

지난 9일, HL만도는 AJ대원과 ‘인공지능(AI) 자율주행 순찰 로봇 상용화’ 양해각서(MOU)를 체결하고 자율주행 순찰로봇 ‘골리’를 과천 래미안슈르아파트에 투입하기로 결정했습니다. 서울 관악구 빌라촌에 이어 새로운 임무를 받게 된 골리! 오늘은 순찰로봇 골리가 태어나기까지의 여정을 되짚어보는 시간을 준비했습니다.
골리의 기획부터 제작까지 모든 과정의 중심에 있었던 ‘골리 아빠’ HL만도 Mobility Solution Tech. Group 로봇플랫폼팀 안재완 책임연구원이 들려주는 골리 개발 이야기, 지금 시작합니다!
안전 빨간불, 순찰 업무를 보조할 ‘패트롤 로봇’이 필요해
골리 개발은 지난 2019년, 신사업을 제안할 수 있는 사내 공모전이 열리면서 시작됐습니다. 공모전에 지원하기 위해 아이템을 찾고 있었는데요, 로봇을 통해 사회적으로 부족한 인프라를 해결할 수 있는 주제를 선정하고 싶었습니다. 그러다가 순찰 인력 부족과 이로 인한 치안 공백 문제를 접하게 되었습니다.
우리나라의 경찰관 1인당 담당 인구수는 2021년 기준 400명으로, OECD가입국의 평균이 약 350명 내외라는 점과 비교했을 때 상당히 높은 수치입니다. 2019년 당시에는 경찰관 1인당 담당 인구수가 422명이나 되었습니다.

치안 공백을 메우기 위한 CCTV의 설치가 늘고 있지만 범죄 건수를 줄이는 데에는 한계가 있고, 경비 인력도 해마다 증가하는 추세입니다. 하지만 경비 노동자의 근무 환경은 쉽게 개선되지 않고 있습니다. 때문에 저희는 정해진 구역을 이동하면서 특수한 상황을 확인하고 판단하는 순찰 업무에서 이동과 확인이라는 단순한 부분을 로봇이 대신해 줄 수 있다면 부족한 인력에 대한 보완이 될 것이라고 생각했고, 순찰 로봇(Patrol robot) ‘골리’의 개발을 제안했습니다. 그렇게 2020년, 본격적인 실외순찰로봇 골리 개발에 착수했습니다.
다사다난한 협력사 찾기
순찰로봇 개발 초기에는 정말 적은 인원으로 프로젝트를 진행해야 했습니다. 때문에 적극적으로 아웃소싱에 나섰는데요. 전국의 로봇 관련 대학 연구실, 스타트업, 중견업체를 적극적으로 찾아 나섰고, 로봇 관련 전시회도 빠짐없이 참관해 시장 동향과 관련 업체 정보를 수집하는 등 다양한 방법으로 협력 가능한 자원을 확보하기 위해 노력했습니다.

협력업체를 어렵게 선정해도 갑작스럽게 협력사의 담당 인력이 변경되어 개발 기간이 거의 두배로 늘어나게 되거나, 빠른 개발을 위해 해외에서 구매한 주행 플랫폼의 부품이 파손되고 모터의 성능이 떨어지는 등 하드웨어 부분에서도 잦은 문제가 있었습니다. 때문에 내구성이 부족한 부분은 강성을 높여 새로 제작하고, 부족한 모터의 성능을 위해 로봇을 더 가볍게 개조해야 했습니다.
골리Ⅱ를 개발할 때에는 골리Ⅰ에서의 경험을 바탕으로 많은 부분을 개선했습니다. 주행 플랫폼은 내구성이 검증된 국내 업체와 협업했으며, 주행용 모터를 위한 제어기는 모터 제어 전문 업체를 통해 별도로 개발했습니다. 이 과정에서도 대학 연구실, 전문 업체 등 협력업체 선정을 위해 백방으로 노력했고, 개발 실패를 겪고 협력업체를 교체하는 과정에서 개발이 지연되는 등 우여곡절을 거쳐야 했습니다.
자율주행 순찰로봇, ‘골리(Goalie)’, 탄생!
여러가지 난관에 부딪히면서도 골리 개발은 계속 진행되었습니다. 이제는 ‘자율주행 순찰 로봇’에 맞는 기술들을 적용해 나갈 차례입니다. 골리는 실내와 달리 변수가 많은 실외 주행을 주 목적으로 하며, 도로가 아닌 골목길이나 공원 등의 환경을 주행해야 하기 때문에 도로와 차선, 신호등과 같은 기존 인프라 없이도 자율주행을 가능케 하는 것이 큰 과제였습니다.

로봇의 실외 자율주행을 위해서는 로봇 스스로 자신의 위치가 어디인지 파악하는 위치 인식(Localization)의 정확도가 중요한 기술 요소로 꼽힙니다. 로봇이 현재 자신의 위치와 목적지의 위치를 정확히 알고 있어야 주행을 시작할 수 있습니다. 실외 환경에서 가장 자주 쓰이는 위치 인식 기술 가운데 하나가 바로 ‘GNSS(Global Navigation Satellite System)’를 이용하는 방법입니다. GNSS는 많은 분들이 흔히 GPS라고 부르는 기술로, 쉽게 GPS가 GNSS의 일부분이라고 볼 수 있습니다. 이동 로봇 개발을 시작하기 전 저희 팀은 Lv.4 자율주행 기술*을 선행 개발하는 업무를 담당했습니다. ‘HOCKEY’라는 자율주행 차량을 판교 일반 도로에서 완전 자율주행이 가능하도록 하는 기술을 개발하고 있었는데, 여기에 사용했던 고정밀 GNSS 기술을 골리에 적용했습니다.
*Lv.4 자율주행 기술: 미국 자동차 공학회 SAE(Society of Automotive Engineers)에서 정의한 자율주행 기술 단계별 분류(0~5) 중 다섯 번째에 해당하는 고등 자율주행(High Automation)을 의미함
고정밀 GNSS를 위해 RTK(Real Time Kinematics)를 활용합니다. RTK는 고정 기지국의 정확한 위치 정보를 기준으로 실시간 통신을 통해 이동하는 GNSS 수신기의 위치를 보정하는 기술입니다. 이 기술을 통해 오차 1~2㎝ 내에서 이동로봇의 위치를 정밀하게 측정할 수 있습니다.
다음은 이동로봇의 자율주행을 위한 주행 환경에 대한 지도를 만드는 일입니다. 골리는 ‘SLAM(Simultaneous Localization And Mapping)’ 기술을 적용했습니다. 골리는 3D 라이다를 통해 지도를 만드는데요, Lidar SLAM 기술을 통해 실외 환경에 대한 더 많은 정보를 지도에 담을 수 있습니다.

하드웨어 측면에서는 야간 순찰 기능을 위해 감시용 카메라 선정에 신경 썼습니다. 순찰로봇은 이동하는 CCTV와 다름없기 때문에 카메라의 성능이 매우 중요합니다. 골리에는 여러 카메라가 장착되어 있는데, 가장 먼저 보다 넓은 구역을 커버하기 위해 CCTV 전문 업체의 PTZ(Pan-Tilt-Zoom) 카메라*를 채택했습니다. 또한 적외선 촬영을 통해 야간 가시거리가 200m에 이르게끔 했으며, 별도의 열상 카메라도 장착했습니다. 열상 카메라는 PTZ 카메라나 360° 카메라로 감시하기 어려운 영역까지도 촬영이 가능해 특히 야간 순찰 기능에 큰 효과를 발휘할 수 있습니다.
*상하좌우로 피사체를 따라가며 확대, 축소 기능을 가진 카메라.
자율주행 로봇은 주행하면서 다양한 장애물과 만나게 됩니다. 골리의 주 활동 무대인 골목길에서는 수많은 보행자와 함께 주차된 차량과 이동하는 차량, 오토바이, 자전거 등의 이동수단 등 로봇과 충돌할 수 있는 다양한 장애물이 존재합니다. 사람이 많은 공원이나 아파트 단지에서는 로봇을 신기하게 여기는 어린이들과 반려동물이 로봇에 접근하는 경우도 있습니다. 때문에 골리는 부딪혀도 큰 충격을 받지 않게끔 사람이 빠르게 걷는 속도 정도로 주행 속도를 설정했으며, 혹시 모를 충격 발생 상황에서도 피해를 최소화할 수 있도록 부드러운 재질의 소프트 커버를 적용했습니다.
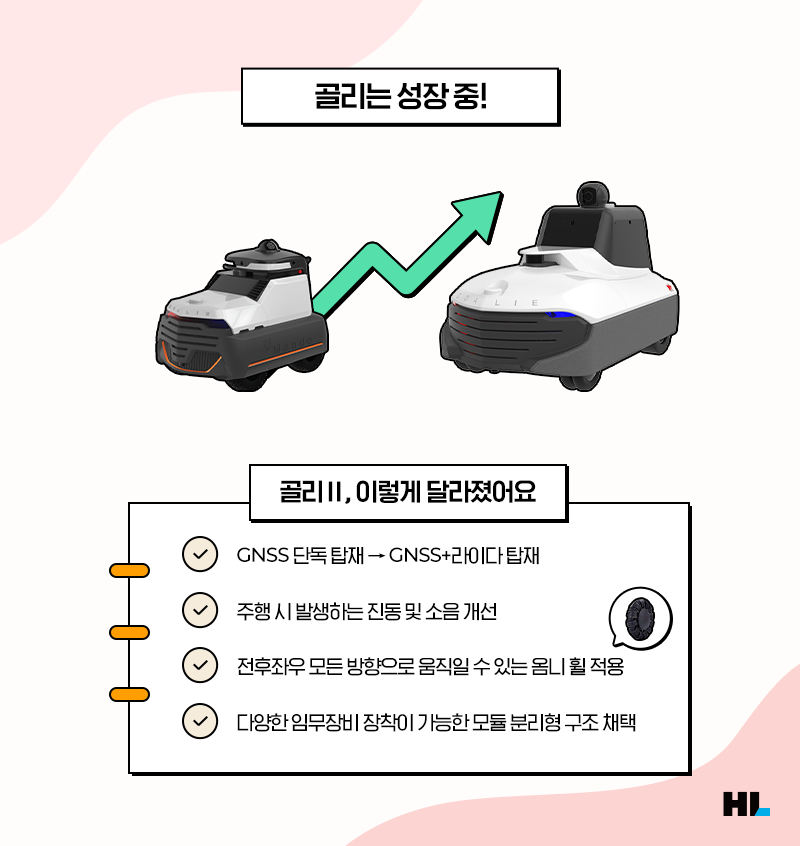
골리Ⅱ에서는 시범운행을 통해 발견한 여러 문제점을 개선했습니다. 먼저 보다 더 정확한 위치 인식을 위해 기존의 GNSS 단독 기반 시스템에서 GNSS와 라이다를 함께 사용하게끔 변경했습니다. GPS(GNSS)에만 의존하면 GPS가 잘 잡히지 않는 환경에서는 위치 인식이 어려운데, 라이다를 사용하면 이런 환경적인 제약에서 조금 더 자유롭습니다. 또한 골리에 이중으로 적용된 2D/3D 라이다 센서는 골리에 장착된 카메라가 이물질 등으로 렌즈가 가려져도 자율주행에 문제가 되지 않게끔 30m범위의 장애물을 인식합니다.
다음으로는 골리의 전륜에 전후좌우 모든 방향으로 움직일 수 있는 옴니 휠(Omni-Wheel)을 적용했습니다. 옴니 휠을 적용하면 보다 자유로운 방향 전환이 가능하고 회전 반경이 작아 골목길과 같은 좁은 공간에서도 방향 전환 등을 수월하게 진행할 수 있습니다. 통상적으로 자유로운 방향전환을 위해 사용하는 크기가 작은 캐스터는 실외 환경에서 지하철 틈새, 배수로 덮개 등에 끼이는 문제가 발생할 수 있어 주행에 장애 요소가 되는데, 옴니 휠을 사용하면 틈에 끼일 염려 없이 주행할 수 있고, 방향 전환도 보다 자유롭게 할 수 있습니다.

로봇 설계에도 변화를 주었습니다. 골리Ⅰ은 순찰 기능에 집중해 임무장비 탈착이 불가능한 구조로 설계하였으나 골리Ⅱ는 다양한 임무장비를 장착할 수 있도록 자율주행 모듈과 임무장비 모듈을 분리한 모듈 분리형 구조를 채택했습니다. 이를 통해 임무장비의 종류에 따라 다양한 목적으로 로봇을 활용할 수 있고, 고객의 상황에 따라 최적의 부품 조합을 가능케 했습니다.
골리, 관제센터의 눈과 귀가 되어줘
이제 골리가 순찰 현장에서 원활하게 업무를 수행할 수 있도록 골리의 업무 프로세스를 구상해야 합니다. 골리는 한 번 충전으로 최대 8시간 이상 운영할 수 있고, 정해진 구간을 자율주행을 통해 이동할 수 있습니다. 하지만 아직은 법적으로 자율주행 로봇의 단독 보행이 불가능하기 때문에 사람이 반드시 함께 동행해야 하는데요. 때문에 골리를 운용할 수 있는 시간을 정해 특정 시간대에 순찰 임무를 진행하게끔 했습니다.

아파트 단지 순찰을 예로 들어볼까요? 정해진 시간이 되면 골리가 단지 내에 지정된 순찰 구간을 돌며 순찰합니다. 순찰 과정에서 촬영된 영상은 아파트의 관리사무소의 관제 시스템으로 전송되고, 관리사무소의 관제 요원은 영상을 통해 순찰 현장의 상황을 확인합니다. 특정 구간에서는 계도 방송 등을 송출할 수 있습니다. 특수한 상황이 발생하면 관제센터에서 직접 로봇을 통해 방송을 하거나 상호 의사 소통도 가능합니다. 순찰이 끝나면 골리는 보관소로 돌아와 충전을 합니다.
골리의 순찰 과정에는 관제센터와의 실시간 소통이 중요한데요. 이를 위해서는 대용량의 데이터 통신 문제를 해결해야 했습니다. 골리는 5G통신을 통해 데이터를 전달할 수 있도록 개발했습니다. 5G 통신은 대용량의 데이터를 빠르게 전송할 수 있기 때문에 골리에 설치된 여러 대의 카메라에서 촬영한 영상을 실시간으로 관제센터에 전송할 수 있습니다. 물론 통신 문제를 자체적으로 개발할 순 없어서 국내 통신사들과 협업을 진행했습니다. 배곧생명공원에서 운영한 골리는 LG U+와, 관악구에서 운영하는 골리는 SKT와의 협업을 통해 데이터 통신 문제를 해결했습니다.
로봇 골리, 순찰임무를 명 받았습니다!
이제 골리를 순찰 현장에 내보내 검증할 시간이 되었습니다. 우리는 골리Ⅰ의 개발과 함께 시흥시의 협조를 얻어 배곧생명공원에서 시범 운영을 진행했습니다. 하지만 시흥시의 협조만으로는 공원에서 골리를 운행할 수는 없었습니다. 공원녹지법에 의하면 이동로봇이 공원을 돌아다니기 위해서는 중량 30㎏ 미만, 최고 속도는 시속 25㎞ 미만이어야 했습니다. 골리는 200㎏이 넘기 때문에 운행이 불가능했습니다. 이러한 문제는 규제 샌드박스 특례를 통해 해결했습니다. 이렇게 지자체 및 관련 기관의 협조를 바탕으로 배곧생명공원은 골리Ⅰ에 이어 골리Ⅱ까지 시범 운영을 진행한 유일한 장소가 되었고, 골리Ⅰ에서 발견한 많은 문제점을 개선할 수 있었던 기회였습니다.

골리Ⅱ와 함께한 관악구에서의 시범 운영은 ‘국민공감 국민참여 R&SD 선도사업’이라는 국책과제의 일환으로 시작됐습니다. 인천대학교가 주관기관이 되어 ‘자율주행 기반 여성 1인 가구 주거지역 안심 순찰 서비스 기술 개발’이라는 과제를 진행했고, HL만도와 SKT, 관악구청이 참여했습니다. 인천대는 자율주행 SW, 만도는 순찰로봇 HW, SKT는 영상 관제와 통신 개발을 담당했습니다. 서울대학교 인근 원룸 밀집 지역에서 순찰 업무를 수행했으며, 과제 종료 후에는 별빛내린천(도림천)~신림역 근방 구간과 낙성대역 인근의 낙성대공원에서 추가 운영 중입니다.
골리가 일상 속에 함께할 날을 꿈꾸다

하지만 여전히 골리에는 몇몇의 아쉬움과 넘어야 할 제약이 남아있습니다.
골리의 기능적인 부분에서 가장 큰 아쉬움은 여전히 골리가 사람을 필요로 한다는 점입니다. 충전과 시동 시 사람이 직접 충전기를 연결하거나 시동을 켜는 등 사람의 개입이 필요한데요. 골리를 개발한 궁극적인 이유는 인력 부담을 줄이는 것에 있기 때문에 향후에 자동 충전 기능 등을 도입해 더 많은 업무를 자동으로 수행 가능하도록 개선할 계획입니다.
또한 골리가 특수 상황을 수집할 수는 있지만, 이에 대한 판단은 아직 사람이 해야 합니다. 예를 들어 흡연의 경우 열상 카메라를 통해 열원을 감지할 수는 있지만 그 원인이 흡연에 의한 것인 지 아닌지를 로봇이 판단하기는 아직 어렵습니다. 때문에 생활 질서 계도를 위해 위법 상황을 로봇이 직접 판단하는 것은 아직 많은 시간이 필요할 것으로 보입니다. 대신 우범지역을 특정해 해당 지역 순찰 시 계도 방송을 진행할 수 있도록 개발 중에 있습니다.

제도적인 부분에서는 더욱 아쉬움이 큰데요. 도로교통법에 따르면 실외 이동로봇은 일반적인 차로 규정됩니다. 따라서 보도와 횡단보도의 운행이 불가능합니다. 순찰을 위해 주행할 수 있는 영역이 차도로만 제한되는 것입니다. 또한 앞서 설명했듯 골리 주행 시 동행인이 반드시 필요하다는 점도 아쉬움으로 남습니다. 주어진 순찰 환경에서 사람의 개입을 최소화한 완전 자율주행이 가능해야 궁극적으로 골리와 같은 패트롤 로봇을 이용한 순찰 업무가 가능할 것이라고 생각하기 때문입니다. 이 부분은 최근 자율주행 로봇을 보행자로 인정하는 법령 개정의 움직임이 있어 조만간 해결되길 기대하고 있습니다.
또한 순찰로봇이 ‘순찰’이라는 기능을 수행하기 위해서는 영상 촬영이 필수입니다. 하지만 개인정보보호법 상 개인의 동의 없이는 본인이 촬영된 영상을 저장하거나 송출하는 것이 금지되어 있습니다. 이 밖에도 앞서 설명한 공원녹지법에 의한 이동로봇 크기와 무게 규제 등 골리가 넘어야 할 규제가 아직 많이 있습니다.

이동로봇의 상용화를 위해 넘어야 하는 다양한 규제들을 해결하기 위해 저희는 ‘자율주행로봇 얼라이언스’에 참여해 목소리를 내고 있습니다. 한국로봇산업협회가 간사를 맡고 있는 자율주행로봇 얼라이언스는 HL만도를 비롯해 LG전자, KT, 현대로보틱스, 우아한형제들 등 이동로봇 서비스를 개발하고 있는 많은 기업들이 함께하고 있습니다. 여기서는 앞서 설명한 다양한 규제를 해결하기 위한 지능형 로봇법 개정을 위해 매달 회의를 진행하고 국회와 언론에도 의견을 전달하는 등 다양한 노력을 하고 있습니다.
골리 아빠에게 ‘무엇이든 물어보세요’

이번 콘텐츠를 준비하면서 HL인스타그램을 통해 골리에 대해 궁금한 점을 물어볼 수 있는 ‘무엇이든 물어보세요’를 진행했는데요, 많은 분들이 골리에 대해 궁금한 점을 남겨 주셨습니다. ‘골리 아빠’ 안 책임이 직접 답하는 골리 Q&A, 아래에서 확인해보세요!
Q. 골리는 어디에서 볼 수 있나요?
골리는 서울시 관악구 신림동 별빛내린천(도림천) 봉림교 구간과 경기도 과천시 래미안슈르아파트에서 만날 수 있습니다.
Q. 골리는 완전 무인으로 운영되나요?
골리는 아직까지 도로교통법과 공원녹지법상 인도나 공원 내 주행은 불법입니다. 따라서 규제샌드박스 신청을 통해 별도로 정해진 구간 내에서만 운행이 가능합니다. 규제샌드박스에서는 로봇에 항상 사람이 동행하도록 규정하고 있기 때문에 완전 무인 운영은 불가능 합니다. 다만 사유지 내에서는 해당 법의 규제를 받지 않기 때문에 사람이 동행할 필요는 없습니다. 하지만 로봇을 충전하고, 관제화면을 통해 관리하는 것은 사람의 몫으로 남아있습니다.
Q. 로봇이 돌아다니는 걸로 순찰이 되나요?
골리는 단순히 순찰 구역을 이동만 하는 것이 아니라 PTZ, IR, 열상 카메라 등으로 영상 정보를 수집할 수 있습니다. 또한 계도 방송을 하거나 필요 시 양방향 통신이 가능합니다. 이러한 기능을 통해 관제 센터에서 상황을 인식하고 대처할 수 있도록 개발되었기 때문에 기본적인 순찰 기능을 수행할 수 있다고 판단하고 있습니다.
Q. 골리랑 교통사고가 나면 어떻게 되나요?
골리는 장애물을 감지하면 스스로 멈추고, 충격을 완화하기 위한 소프트 커버를 장착하는 등 안전을 위해 다양한 설계를 적용했습니다. 하지만 로봇을 운영하는 실외 환경은 다양하고 많은 장애물이 존재하기 때문에 방심할 수는 없습니다. 따라서 골리는 책임보험에 가입되어 있습니다. 골리와 교통사고로 인해 발생 가능한 인적, 물적 피해에 대해서는 최대 수억원의 보상 지급이 가능하기 때문에 안심하셔도 좋습니다. 물론 가장 중요한 것은 사고가 발생하지 않도록 예방하는 것입니다.
지금까지 ‘골리 아빠’ HL만도 안재완 책임연구원의 골리 개발 스토리를 들어보았습니다. 로봇 하나에 정말 많은 정성이 들어간다는 사실을 새삼 느낄 수 있었는데요, 앞으로 우리의 곁을 든든하게 지켜 줄 골리의 활약에 많은 기대 부탁드립니다!
HL만도에서는 제2, 제3의 골리 아빠를 찾고 있습니다. 세상을 바꿀 로봇을 만들고 싶은 분들이라면
주저하지 말고 HL만도로 오세요!



